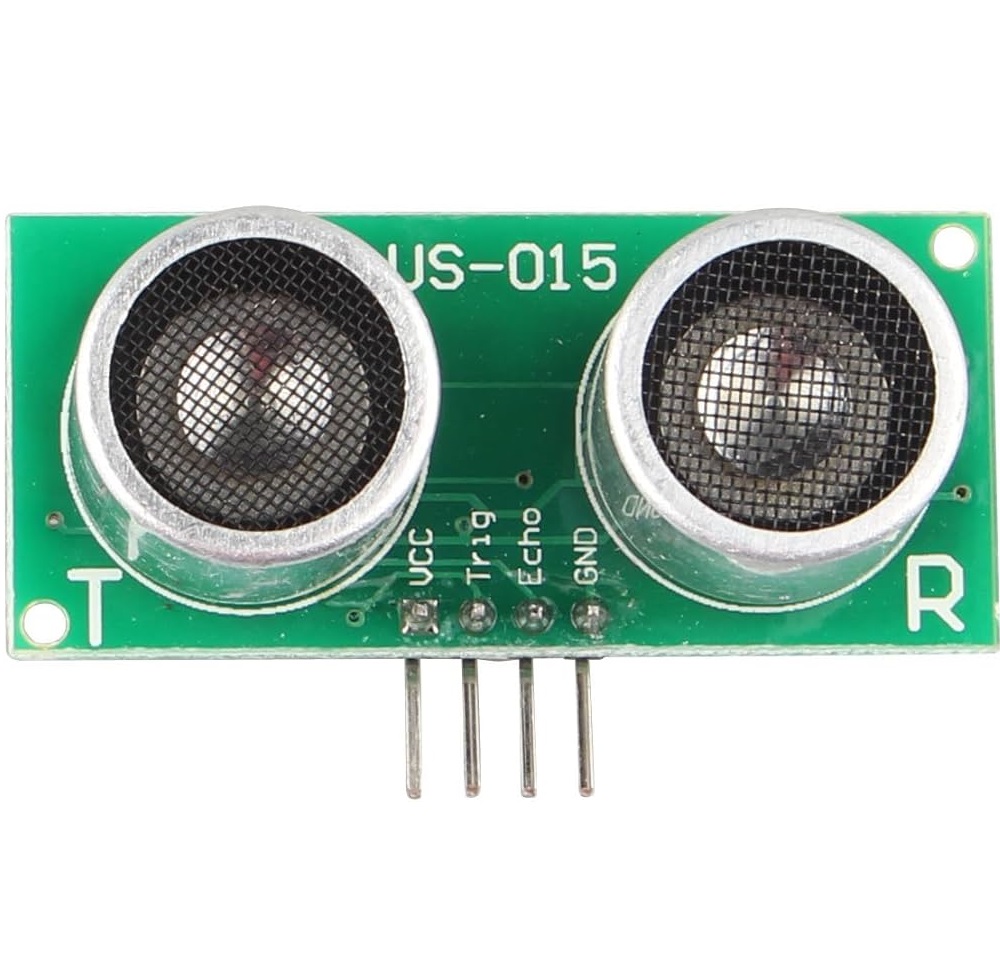
Ultrasonic US-015 Module Distance Sensor
The US-015 Ultrasonic Distance Sensor is a precise and reliable module designed for non-contact distance measurement. It can detect objects within 2–700 cm with 1 mm accuracy, making it a better choice than the popular HC-SR04 in terms of stability and resolution. It works seamlessly with microcontrollers such as Arduino, Raspberry Pi, and STM boards.
Package Includes:
- 1 x Ultrasonic US-015 Module
Features:
- Operating Voltage: 5V DC
- Current: 2.2–3 mA
- Distance Range: 2 – 700 cm
- Accuracy: ±1 mm
- Beam Angle: Max 15°
- Output: Positive TTL pulse (0–5V)
- Size: 45 x 20 x 16 mm
- Weight: 10 g
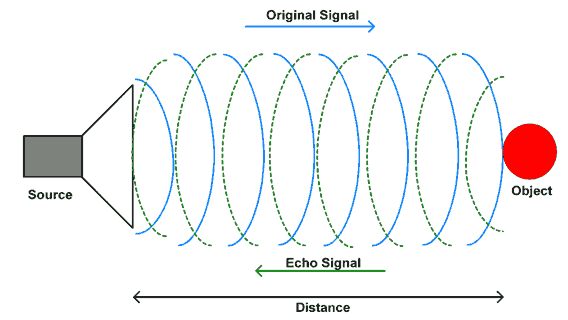
Principle of Work:
The US-015 operates using SONAR principles. It emits ultrasonic waves, which reflect off an object and return as an echo. The module calculates the distance based on the time taken for the echo to return, using the speed of sound as reference.
Pinout:

| Pin | Description |
|---|---|
| VCC | +5V power supply |
| Trig | Trigger Input Pin |
| Echo | Echo Output Pin |
| GND | Ground |
Applications:
- Anti-collision systems
- People and presence detection
- Robotics (wall-following, maze-solving)
- Pallet detection in forklifts
- Bottle counting on conveyor belts
- Paper detection in printers
- Trash collection vehicle automation
Circuit Example:
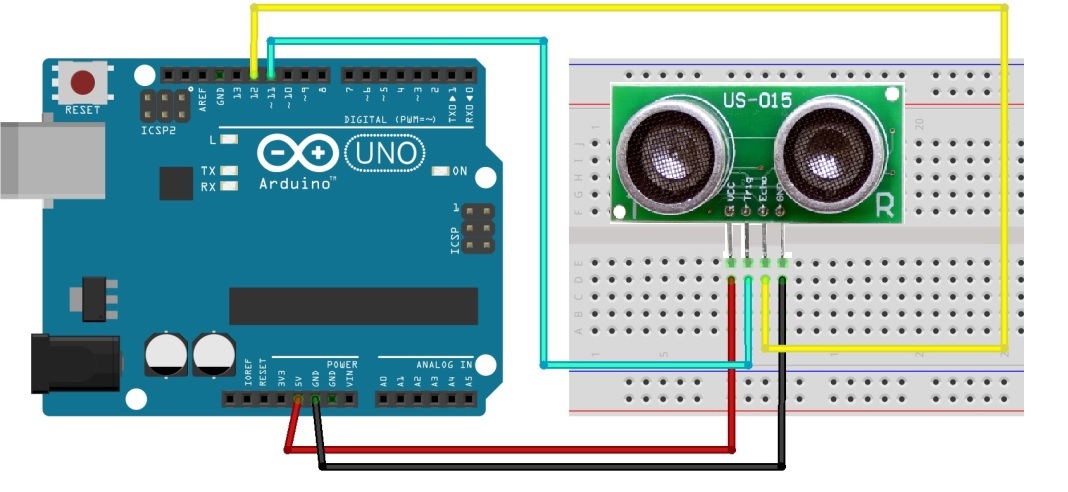
| Ultrasonic Sensor | Arduino |
|---|---|
| VCC | 5V |
| Trig | Pin 11 |
| Echo | Pin 12 |
| GND | GND |
Arduino Code Example:
#include "NewPing.h"
#define TRIGGER_PIN 12
#define ECHO_PIN 11
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(115200);
}
void loop() {
delay(50);
Serial.print("Ping: ");
Serial.print(sonar.ping_cm());
Serial.println("cm");
}
Comparisons:
- US-015 vs HC-SR04: US-015 offers better accuracy (±1 mm) and longer stable range (up to 7 m).
- Ultrasonic vs PIR: PIR detects motion via infrared heat, while Ultrasonic measures distance via sound waves. PIR consumes less power but has a shorter range and limited applications.
Features:
- Operating Voltage: 5V DC
- Current: 2.2–3 mA
- Distance Range: 2 – 700 cm
- Accuracy: ±1 mm
- Beam Angle: Max 15°
- Output: Positive TTL pulse (0–5V)
- Size: 45 x 20 x 16 mm
- Weight: 10 g
Principle of Work:
The US-015 operates using SONAR principles. It emits ultrasonic waves, which reflect off an object and return as an echo. The module calculates the distance based on the time taken for the echo to return, using the speed of sound as reference.
Pinout:
| Pin | Description |
|---|---|
| VCC | +5V power supply |
| Trig | Trigger Input Pin |
| Echo | Echo Output Pin |
| GND | Ground |
Applications:
- Anti-collision systems
- People and presence detection
- Robotics (wall-following, maze-solving)
- Pallet detection in forklifts
- Bottle counting on conveyor belts
- Paper detection in printers
- Trash collection vehicle automation
Circuit Example:
| Ultrasonic Sensor | Arduino |
|---|---|
| VCC | 5V |
| Trig | Pin 11 |
| Echo | Pin 12 |
| GND | GND |
Arduino Code Example:
#include "NewPing.h"
#define TRIGGER_PIN 12
#define ECHO_PIN 11
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(115200);
}
void loop() {
delay(50);
Serial.print("Ping: ");
Serial.print(sonar.ping_cm());
Serial.println("cm");
}
Comparisons:
- US-015 vs HC-SR04: US-015 offers better accuracy (±1 mm) and longer stable range (up to 7 m).
- Ultrasonic vs PIR: PIR detects motion via infrared heat, while Ultrasonic measures distance via sound waves. PIR consumes less power but has a shorter range and limited applications.