Features
- Dual-channel motor driver
- Can control two DC motors or a bipolar stepper motor
- Maximum current of 1.5A per channel
- Voltage range of 2.5V to 10V
- Uses an H-bridge circuit to control the direction and speed of the motor
- Built-in protection features: overcurrent, overtemperature, undervoltage lockout
- Can be easily controlled by a microcontroller or digital circuits
- Uses PWM signals to adjust motor speed and logic signals to control the direction
- Compact and low-cost solution for controlling small motors
- Suitable for various applications such as robotics, automation, and hobby projects
Principle of Work
The MX1508 motor driver module works by using an H-bridge circuit to control the direction and speed of the motor. An H-bridge allows current to flow in two directions through the motor, enabling it to rotate both clockwise and counterclockwise. The module has two H-bridge circuits, one for each motor channel, allowing independent control of two motors. Motor speed is controlled by a PWM (Pulse-Width Modulation) signal from a microcontroller or digital circuits, which varies the duty cycle of the voltage applied to the motor. Motor direction is controlled by logic signals, which determine which side of the H-bridge is active and thus the current flow through the motor.
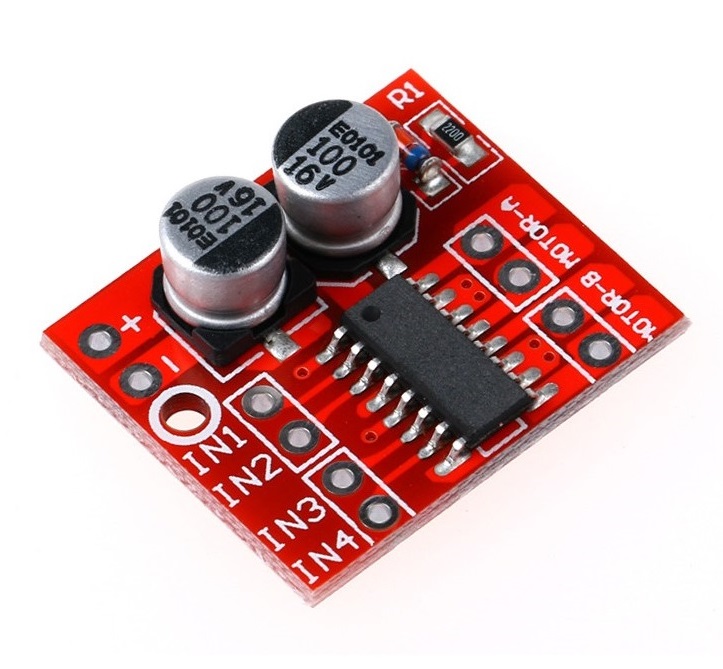
Pinout of the Module

- VCC: Power supply positive (2.5V to 10V)
- GND: Power supply negative and ground
- IN1: Input 1 for motor channel A
- IN2: Input 2 for motor channel A
- IN3: Input 1 for motor channel B
- IN4: Input 2 for motor channel B
- OUTA: Output for motor channel A
- OUTB: Output for motor channel B
Note: IN1 and IN2 control motor A direction and speed, while IN3 and IN4 control motor B. Connect OUTA and OUTB directly to the motor terminals.
Applications
- Robotics: Control small motors for robot arms, grippers, or mobile robots.
- Automation: Drive motors in conveyor belts, pumps, and valves.
- Hobby projects: Control motors in RC cars, boats, and airplanes.
- Educational projects: Teach motor control and microcontroller programming in labs or science projects.
Circuit
Connect the module to Arduino, motors, and power supply as shown below:

Library
No library is required.
Code
Arduino example to control MX1508 motors connected to module pins A1, A2, B1, B2 and Arduino pins 11, 10, 6, 5:
// Motor Driver Module 2ch mini 1.5A 10V MX1508
// Connections: A1 -> 11, A2 -> 10, B1 -> 6, B2 -> 5
#define A2 10
#define A1 11
#define B2 5
#define B1 6
void setup() {
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
pinMode(B1, OUTPUT);
pinMode(B2, OUTPUT);
}
void loop() {
// Motor A forward
digitalWrite(A1, HIGH);
digitalWrite(A2, LOW);
// Motor B forward
digitalWrite(B1, HIGH);
digitalWrite(B2, LOW);
delay(1000);
// Motor A backward
digitalWrite(A1, LOW);
digitalWrite(A2, HIGH);
// Motor B backward
digitalWrite(B1, LOW);
digitalWrite(B2, HIGH);
delay(1000);
// Motor A stop
digitalWrite(A1, LOW);
digitalWrite(A2, LOW);
// Motor B stop
digitalWrite(B1, LOW);
digitalWrite(B2, LOW);
delay(1000);
// Motor A forward at half speed
analogWrite(A1, 128);
digitalWrite(A2, LOW);
// Motor B forward at half speed
analogWrite(B1, 128);
digitalWrite(B2, LOW);
delay(1000);
}
- Defines Arduino pins connected to module inputs for motor control.
setup()configures the pins as outputs.loop()alternates motor direction and speed usingdigitalWrite()andanalogWrite().delay()sets timing between motor actions.
Technical Details
- 2-Channel mini motor driver
- Voltage Input: 2-10V DC
- Rated Current: 1.5A per channel
- Peak Current: 2.5A (less than 10 seconds)
- H-bridge direction and PWM control
- Dimensions: 24.7 x 21 x 5mm
- Weight: 5g
Resources
Comparisons
The MX1508 module and L293D module are both dual-channel motor drivers but differ in:
- Maximum current: MX1508 supports 1.5A per channel; L293D supports 0.6A per channel.
- Voltage range: MX1508 supports 2.5V–10V; L293D supports 4.5V–36V.
- Control signals: MX1508 uses PWM and logic signals; L293D requires two logic inputs and no built-in PWM.
- Circuit design: MX1508 uses compact H-bridge design; L293D uses traditional H-bridge with different components.
MX1508 is more versatile with higher current and precise control, while L293D is simple and reliable for basic motor control.
Features
- Dual-channel motor driver
- Can control two DC motors or a bipolar stepper motor
- Maximum current of 1.5A per channel
- Voltage range of 2.5V to 10V
- Uses an H-bridge circuit to control the direction and speed of the motor
- Built-in protection features: overcurrent, overtemperature, undervoltage lockout
- Can be easily controlled by a microcontroller or digital circuits
- Uses PWM signals to adjust motor speed and logic signals to control the direction
- Compact and low-cost solution for controlling small motors
- Suitable for various applications such as robotics, automation, and hobby projects
Principle of Work
The MX1508 motor driver module works by using an H-bridge circuit to control the direction and speed of the motor. An H-bridge allows current to flow in two directions through the motor, enabling it to rotate both clockwise and counterclockwise. The module has two H-bridge circuits, one for each motor channel, allowing independent control of two motors. Motor speed is controlled by a PWM (Pulse-Width Modulation) signal from a microcontroller or digital circuits, which varies the duty cycle of the voltage applied to the motor. Motor direction is controlled by logic signals, which determine which side of the H-bridge is active and thus the current flow through the motor.
Pinout of the Module
- VCC: Power supply positive (2.5V to 10V)
- GND: Power supply negative and ground
- IN1: Input 1 for motor channel A
- IN2: Input 2 for motor channel A
- IN3: Input 1 for motor channel B
- IN4: Input 2 for motor channel B
- OUTA: Output for motor channel A
- OUTB: Output for motor channel B
Note: IN1 and IN2 control motor A direction and speed, while IN3 and IN4 control motor B. Connect OUTA and OUTB directly to the motor terminals.
Applications
- Robotics: Control small motors for robot arms, grippers, or mobile robots.
- Automation: Drive motors in conveyor belts, pumps, and valves.
- Hobby projects: Control motors in RC cars, boats, and airplanes.
- Educational projects: Teach motor control and microcontroller programming in labs or science projects.
Circuit
Connect the module to Arduino, motors, and power supply as shown below:
Library
No library is required.
Code
Arduino example to control MX1508 motors connected to module pins A1, A2, B1, B2 and Arduino pins 11, 10, 6, 5:
// Motor Driver Module 2ch mini 1.5A 10V MX1508
// Connections: A1 -> 11, A2 -> 10, B1 -> 6, B2 -> 5
#define A2 10
#define A1 11
#define B2 5
#define B1 6
void setup() {
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
pinMode(B1, OUTPUT);
pinMode(B2, OUTPUT);
}
void loop() {
// Motor A forward
digitalWrite(A1, HIGH);
digitalWrite(A2, LOW);
// Motor B forward
digitalWrite(B1, HIGH);
digitalWrite(B2, LOW);
delay(1000);
// Motor A backward
digitalWrite(A1, LOW);
digitalWrite(A2, HIGH);
// Motor B backward
digitalWrite(B1, LOW);
digitalWrite(B2, HIGH);
delay(1000);
// Motor A stop
digitalWrite(A1, LOW);
digitalWrite(A2, LOW);
// Motor B stop
digitalWrite(B1, LOW);
digitalWrite(B2, LOW);
delay(1000);
// Motor A forward at half speed
analogWrite(A1, 128);
digitalWrite(A2, LOW);
// Motor B forward at half speed
analogWrite(B1, 128);
digitalWrite(B2, LOW);
delay(1000);
}
- Defines Arduino pins connected to module inputs for motor control.
setup()configures the pins as outputs.loop()alternates motor direction and speed usingdigitalWrite()andanalogWrite().delay()sets timing between motor actions.
Technical Details
- 2-Channel mini motor driver
- Voltage Input: 2-10V DC
- Rated Current: 1.5A per channel
- Peak Current: 2.5A (less than 10 seconds)
- H-bridge direction and PWM control
- Dimensions: 24.7 x 21 x 5mm
- Weight: 5g
Resources
Comparisons
The MX1508 module and L293D module are both dual-channel motor drivers but differ in:
- Maximum current: MX1508 supports 1.5A per channel; L293D supports 0.6A per channel.
- Voltage range: MX1508 supports 2.5V–10V; L293D supports 4.5V–36V.
- Control signals: MX1508 uses PWM and logic signals; L293D requires two logic inputs and no built-in PWM.
- Circuit design: MX1508 uses compact H-bridge design; L293D uses traditional H-bridge with different components.
MX1508 is more versatile with higher current and precise control, while L293D is simple and reliable for basic motor control.