

Features:
- 3-axis acceleration measurement with analog outputs
- ±3g full-scale range for accurate motion detection
- Adjustable bandwidth via external capacitors
- Low power consumption for battery-powered applications
- High shock resistance: up to 10,000g
- Built-in voltage regulator: compatible with 3.3V–6V supply
- Compact size, lightweight, and Arduino-compatible
Specifications:
| Parameter | Value |
|---|---|
| Operating Voltage | 1.8V – 3.6V (Sensor), 3.3V – 6V (Module) |
| Operating Current | 350μA (typical) |
| Sensing Range | ±3g |
| Temperature Range | −40°C to +85°C |
| Sensitivity | 270 to 330mV/g |
| Shock Resistance | Up to 10,000g |
| Module Dimensions | 4mm x 4mm x 1.45mm |
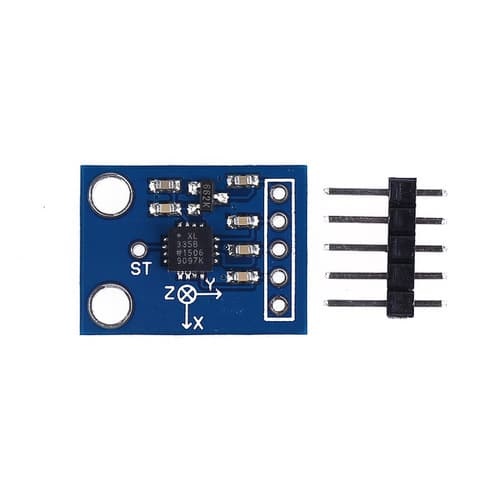
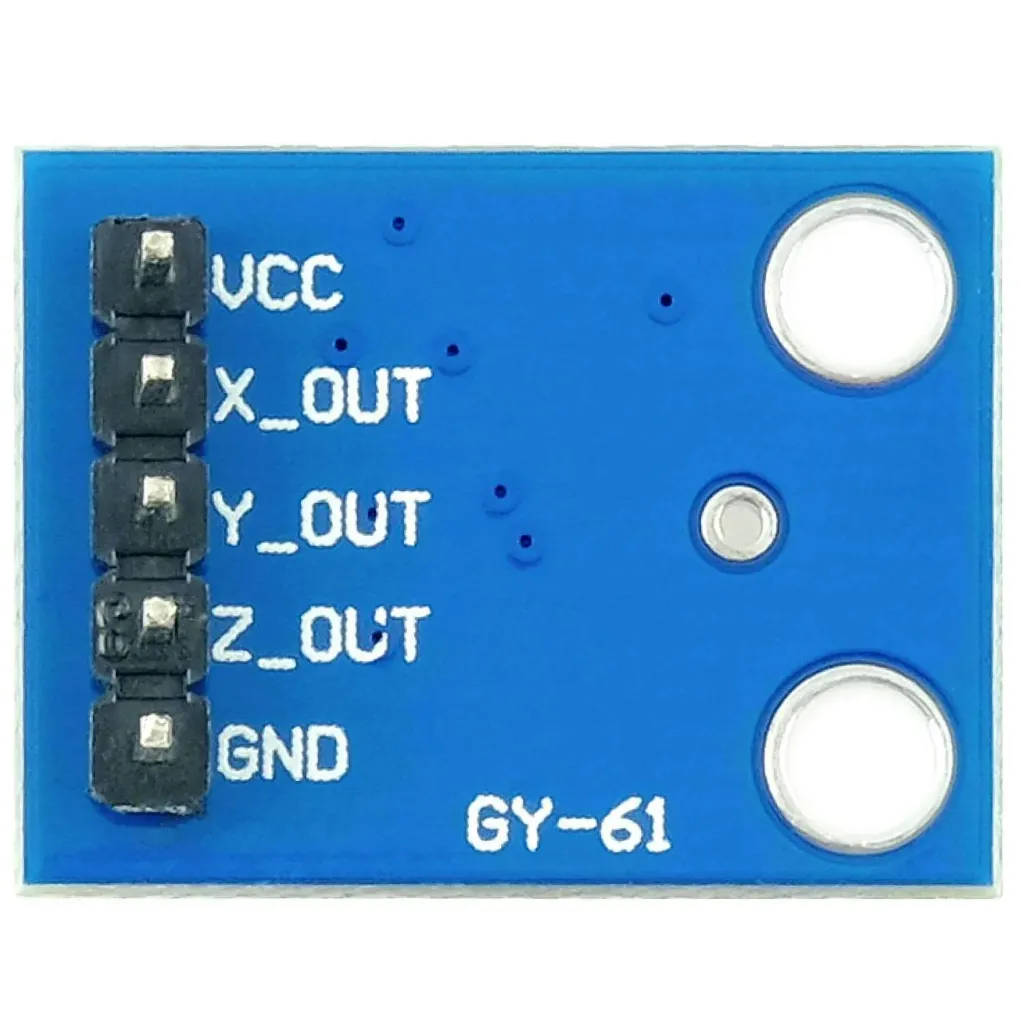
Pinout:

| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply (3.3V to 6V) |
| 2 | GND | Ground |
| 3 | XOUT | Analog output for X-axis |
| 4 | YOUT | Analog output for Y-axis |
| 5 | ZOUT | Analog output for Z-axis |
Wiring with Arduino:

| GY-61 Pin | Arduino Pin |
|---|---|
| VCC | 3.3V |
| GND | GND |
| XOUT | A0 |
| YOUT | A1 |
| ZOUT | A2 |
Calibration Tips:
- When flat: Z-axis ≈ 1g; X and Y ≈ 0g
- Rotate the sensor to calibrate ±1g and 0g for each axis
Arduino Code Example:
const int xpin = A0;
const int ypin = A1;
const int zpin = A2;
void setup() {
Serial.begin(9600);
}
void loop() {
int x = analogRead(xpin);
int y = analogRead(ypin);
int z = analogRead(zpin);
Serial.print(((float)x - 331.5) / 65 * 9.8); // X-axis in m/s²
Serial.print("\t");
Serial.print(((float)y - 329.5) / 68.5 * 9.8); // Y-axis in m/s²
Serial.print("\t");
Serial.print(((float)z - 340) / 68 * 9.8); // Z-axis in m/s²
Serial.println();
delay(1000);
}
Applications:
- Tilt and orientation sensing
- Motion tracking
- Vibration monitoring
- Robotics and drones
- DIY accelerometer-based control systems
Video Tutorial:
Features:
- 3-axis acceleration measurement with analog outputs
- ±3g full-scale range for accurate motion detection
- Adjustable bandwidth via external capacitors
- Low power consumption for battery-powered applications
- High shock resistance: up to 10,000g
- Built-in voltage regulator: compatible with 3.3V–6V supply
- Compact size, lightweight, and Arduino-compatible
Specifications:
| Parameter | Value |
|---|---|
| Operating Voltage | 1.8V – 3.6V (Sensor), 3.3V – 6V (Module) |
| Operating Current | 350μA (typical) |
| Sensing Range | ±3g |
| Temperature Range | −40°C to +85°C |
| Sensitivity | 270 to 330mV/g |
| Shock Resistance | Up to 10,000g |
| Module Dimensions | 4mm x 4mm x 1.45mm |
Pinout:
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply (3.3V to 6V) |
| 2 | GND | Ground |
| 3 | XOUT | Analog output for X-axis |
| 4 | YOUT | Analog output for Y-axis |
| 5 | ZOUT | Analog output for Z-axis |
Wiring with Arduino:
| GY-61 Pin | Arduino Pin |
|---|---|
| VCC | 3.3V |
| GND | GND |
| XOUT | A0 |
| YOUT | A1 |
| ZOUT | A2 |
Calibration Tips:
- When flat: Z-axis ≈ 1g; X and Y ≈ 0g
- Rotate the sensor to calibrate ±1g and 0g for each axis
Arduino Code Example:
const int xpin = A0;
const int ypin = A1;
const int zpin = A2;
void setup() {
Serial.begin(9600);
}
void loop() {
int x = analogRead(xpin);
int y = analogRead(ypin);
int z = analogRead(zpin);
Serial.print(((float)x - 331.5) / 65 * 9.8); // X-axis in m/s²
Serial.print("\t");
Serial.print(((float)y - 329.5) / 68.5 * 9.8); // Y-axis in m/s²
Serial.print("\t");
Serial.print(((float)z - 340) / 68 * 9.8); // Z-axis in m/s²
Serial.println();
delay(1000);
}
Applications:
- Tilt and orientation sensing
- Motion tracking
- Vibration monitoring
- Robotics and drones
- DIY accelerometer-based control systems