
Features
- Compact and lightweight design
- Ideal for mobile robots and educational projects
- 120:1 plastic gearbox for enhanced torque
- L-shaped plastic shaft for easy mounting and integration
- Durable and easy to use in low voltage applications
Specifications
- Gear Ratio: 1:120
- Working Voltage: 3V to 6V
- No-load Current: ≤250mA @ 6V, ≤160mA @ 3V
- No-load Speed: 250 ±10% rpm @ 6V, 110 ±10% rpm @ 3V
- Motor Type: DC Geared Motor
- Mounting Shaft: L-shaped plastic
Principle of Work
The motor operates as a DC motor, converting electrical energy into mechanical rotation. The integrated plastic gearbox reduces speed while increasing torque, making it suitable for driving wheels or gears in small robots. When voltage is applied, the motor spins, and the gearbox multiplies the torque while reducing the output RPM proportionally to the gear ratio.
Applications
- Robot cars and mobile robots
- Small educational robotic kits
- DIY motorized projects
- Prototyping mechanical devices
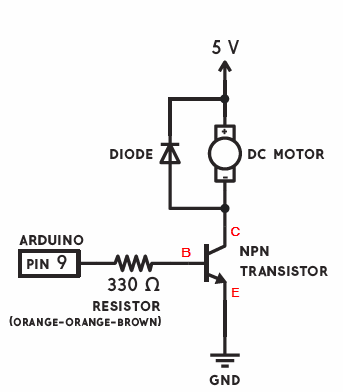
Arduino Integration Example
You can control this motor using a motor driver module like L298N, L293D, or a transistor like 2N2222 for one-way control. The motor can be driven using PWM signals for speed control and digital pins for direction with drivers.
// Example Arduino code for controlling speed with PWM
int motorPin = 9; // PWM pin connected to motor driver
int speed = 200; // Speed value from 0-255
void setup() {
pinMode(motorPin, OUTPUT);
}
void loop() {
analogWrite(motorPin, speed); // Set motor speed
delay(2000);
analogWrite(motorPin, 0); // Stop motor
delay(1000);
}
Additional Notes
While this motor is lightweight and economical, it is designed for low to medium load projects. Overloading the motor may reduce its lifespan. The L-shaped shaft allows simple mounting, but ensure alignment when connecting to wheels or gears for optimal performance. Using a proper motor driver with current limiting ensures safe and reliable operation.
Features
- Compact and lightweight design
- Ideal for mobile robots and educational projects
- 120:1 plastic gearbox for enhanced torque
- L-shaped plastic shaft for easy mounting and integration
- Durable and easy to use in low voltage applications
Specifications
- Gear Ratio: 1:120
- Working Voltage: 3V to 6V
- No-load Current: ≤250mA @ 6V, ≤160mA @ 3V
- No-load Speed: 250 ±10% rpm @ 6V, 110 ±10% rpm @ 3V
- Motor Type: DC Geared Motor
- Mounting Shaft: L-shaped plastic
Principle of Work
The motor operates as a DC motor, converting electrical energy into mechanical rotation. The integrated plastic gearbox reduces speed while increasing torque, making it suitable for driving wheels or gears in small robots. When voltage is applied, the motor spins, and the gearbox multiplies the torque while reducing the output RPM proportionally to the gear ratio.
Applications
- Robot cars and mobile robots
- Small educational robotic kits
- DIY motorized projects
- Prototyping mechanical devices
Arduino Integration Example
You can control this motor using a motor driver module like L298N, L293D, or a transistor like 2N2222 for one-way control. The motor can be driven using PWM signals for speed control and digital pins for direction with drivers.
// Example Arduino code for controlling speed with PWM
int motorPin = 9; // PWM pin connected to motor driver
int speed = 200; // Speed value from 0-255
void setup() {
pinMode(motorPin, OUTPUT);
}
void loop() {
analogWrite(motorPin, speed); // Set motor speed
delay(2000);
analogWrite(motorPin, 0); // Stop motor
delay(1000);
}
Additional Notes
While this motor is lightweight and economical, it is designed for low to medium load projects. Overloading the motor may reduce its lifespan. The L-shaped shaft allows simple mounting, but ensure alignment when connecting to wheels or gears for optimal performance. Using a proper motor driver with current limiting ensures safe and reliable operation.