Motor Driver Board Module L298n Dual H-Bridge DC Stepper Control Advanced Version
The L298N Motor Driver Module is a high-power motor driver based on the L298N dual H-Bridge IC. It is capable of controlling two DC motors or one stepper motor simultaneously, making it ideal for robotics, CNC machines, and automation projects. It supports both 3.3V and 5V logic microcontrollers like Arduino and Raspberry Pi and features a built-in 5V regulator and heat sink for enhanced stability and performance.
Package Includes:
- 1 x L298N Dual H-Bridge Motor Driver Module
Features:
- Dual Motor Control: Supports 2 DC motors or 1 stepper motor
- Wide Voltage Range: Operates between 5V and 35V
- Current Capacity: Up to 2A per channel
- Onboard 5V Regulator: Provides 5V output for external use
- PWM Speed Control: Enable pins for motor speed adjustments
- Built-in Heat Sink: Effective thermal dissipation
- Reverse Polarity Protection: Safe motor control
- Logic Level Support: Compatible with 3.3V and 5V systems
Specifications:
| Parameter | Value |
|---|---|
| Operating Voltage | 5V – 35V |
| Output Peak Current | 2A per channel |
| Logic Voltage | 4.5V – 5.5V |
| Logic Current | 0 – 36mA |
| PWM Control | Yes (Enable A & B) |
| Max Power | 20W |
| Operating Temperature | -25°C to 130°C |
| Module Size | 55 x 60 x 30 mm |
Pinout:
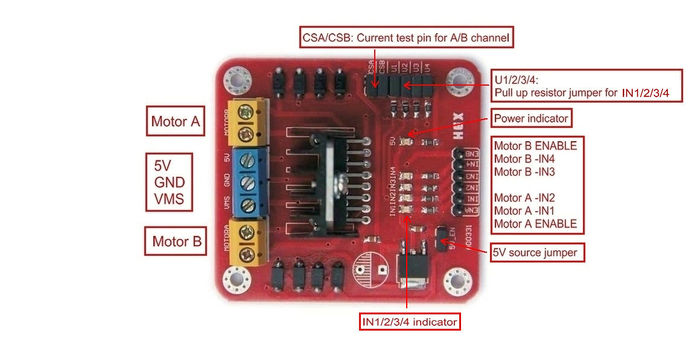
| Pin Label | Description |
|---|---|
| VMS | Motor Power Supply (5V–35V) |
| GND | Ground |
| 5V | 5V Output from onboard regulator |
| IN1, IN2 | Motor A control inputs |
| IN3, IN4 | Motor B control inputs |
| ENA, ENB | PWM speed control for Motor A & B |
| OUT1, OUT2 | Motor A outputs |
| OUT3, OUT4 | Motor B outputs |
Wiring Guide:
Example connections between L298N, Arduino, and a stepper motor:
| L298N Pin | Arduino Pin | Stepper Motor |
|---|---|---|
| ENA | 5V or PWM pin | - |
| IN1 | D8 | Coil 1A |
| IN2 | D9 | Coil 1B |
| IN3 | D10 | Coil 2A |
| IN4 | D11 | Coil 2B |
| ENB | 5V or PWM pin | - |
| VMS | 12V External | - |
| GND | GND | - |
Wiring Diagram:

Example Arduino Code:
// Define control pins
#define IN1 8
#define IN2 9
#define IN3 10
#define IN4 11
#define ENA 5
#define ENB 6
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
digitalWrite(ENA, HIGH); // Enable Motor A
digitalWrite(ENB, HIGH); // Enable Motor B
}
void loop() {
// Rotate clockwise
stepMotor(1);
delay(1000);
// Rotate counterclockwise
stepMotor(2);
delay(1000);
}
void stepMotor(int direction) {
if (direction == 1) {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
} else if (direction == 2) {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
}
Applications:
- Robotics
- Stepper Motor Control
- Automated Machinery
- CNC Projects
- DIY Electronics Projects
Features:
- Dual Motor Control: Supports 2 DC motors or 1 stepper motor
- Wide Voltage Range: Operates between 5V and 35V
- Current Capacity: Up to 2A per channel
- Onboard 5V Regulator: Provides 5V output for external use
- PWM Speed Control: Enable pins for motor speed adjustments
- Built-in Heat Sink: Effective thermal dissipation
- Reverse Polarity Protection: Safe motor control
- Logic Level Support: Compatible with 3.3V and 5V systems
Specifications:
| Parameter | Value |
|---|---|
| Operating Voltage | 5V – 35V |
| Output Peak Current | 2A per channel |
| Logic Voltage | 4.5V – 5.5V |
| Logic Current | 0 – 36mA |
| PWM Control | Yes (Enable A & B) |
| Max Power | 20W |
| Operating Temperature | -25°C to 130°C |
| Module Size | 55 x 60 x 30 mm |
Pinout:
| Pin Label | Description |
|---|---|
| VMS | Motor Power Supply (5V–35V) |
| GND | Ground |
| 5V | 5V Output from onboard regulator |
| IN1, IN2 | Motor A control inputs |
| IN3, IN4 | Motor B control inputs |
| ENA, ENB | PWM speed control for Motor A & B |
| OUT1, OUT2 | Motor A outputs |
| OUT3, OUT4 | Motor B outputs |
Wiring Guide:
Example connections between L298N, Arduino, and a stepper motor:
| L298N Pin | Arduino Pin | Stepper Motor |
|---|---|---|
| ENA | 5V or PWM pin | - |
| IN1 | D8 | Coil 1A |
| IN2 | D9 | Coil 1B |
| IN3 | D10 | Coil 2A |
| IN4 | D11 | Coil 2B |
| ENB | 5V or PWM pin | - |
| VMS | 12V External | - |
| GND | GND | - |
Wiring Diagram:
Example Arduino Code:
// Define control pins
#define IN1 8
#define IN2 9
#define IN3 10
#define IN4 11
#define ENA 5
#define ENB 6
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
digitalWrite(ENA, HIGH); // Enable Motor A
digitalWrite(ENB, HIGH); // Enable Motor B
}
void loop() {
// Rotate clockwise
stepMotor(1);
delay(1000);
// Rotate counterclockwise
stepMotor(2);
delay(1000);
}
void stepMotor(int direction) {
if (direction == 1) {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
} else if (direction == 2) {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
}
Applications:
- Robotics
- Stepper Motor Control
- Automated Machinery
- CNC Projects
- DIY Electronics Projects