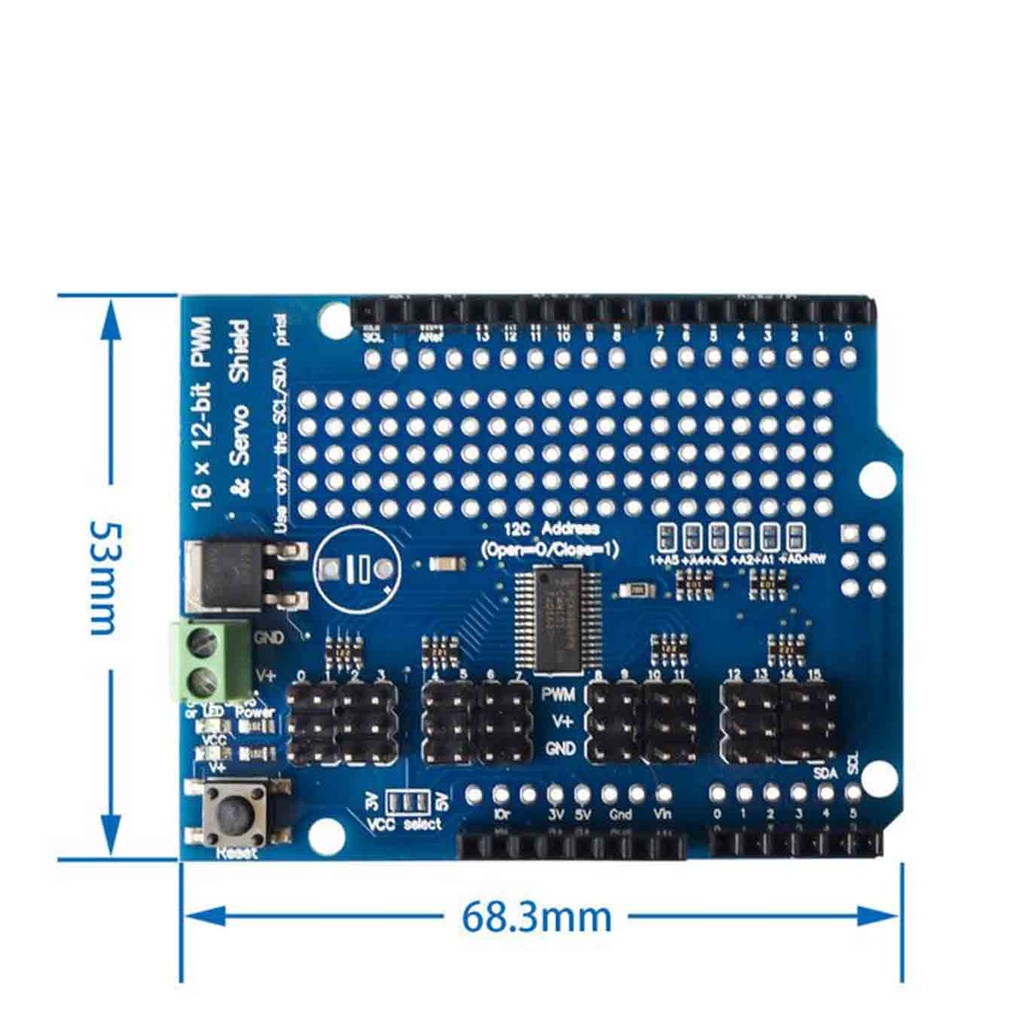
Specifications:
- I2C Protocol Interface
- Compatible with 3.3V and 5V MCUs
- Frequency range: 24 Hz to 1526 Hz
- 16 PWM output channels
- Supply Voltage: 2.3 V to 5.5 V
- Operating Temperature: -40 °C to +85 °C
- Resolution: 12-bit (4096 steps)
Important Files:
Arduino Sample Code:
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
// Use default I2C address 0x40
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
#define SERVOMIN 150 // Min pulse length out of 4096
#define SERVOMAX 600 // Max pulse length out of 4096
#define USMIN 600 // Min microsecond length
#define USMAX 2400 // Max microsecond length
#define SERVO_FREQ 50 // Typical servo frequency ~50 Hz
uint8_t servonum = 0;
void setup() {
Serial.begin(9600);
Serial.println("8 channel Servo test!");
pwm.begin();
pwm.setOscillatorFrequency(27000000);
pwm.setPWMFreq(SERVO_FREQ); // Analog servos run at ~50 Hz
delay(10);
}
// Optional function to set pulse length in seconds (not precise)
void setServoPulse(uint8_t n, double pulse) {
double pulselength = 1000000; // 1,000,000 us per second
pulselength /= SERVO_FREQ; // us per period
Serial.print(pulselength);
Serial.println(" us per period");
pulselength /= 4096; // us per bit
Serial.print(pulselength);
Serial.println(" us per bit");
pulse *= 1000000; // convert to us
pulse /= pulselength;
Serial.println(pulse);
pwm.setPWM(n, 0, pulse);
}
void loop() {
// Sweep each servo from min to max and back using setPWM()
Serial.println(servonum);
for (uint16_t pulselen = SERVOMIN; pulselen < SERVOMAX; pulselen++) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
for (uint16_t pulselen = SERVOMAX; pulselen > SERVOMIN; pulselen--) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
// Sweep servo using writeMicroseconds() (less precise)
for (uint16_t microsec = USMIN; microsec < USMAX; microsec++) {
pwm.writeMicroseconds(servonum, microsec);
}
delay(500);
for (uint16_t microsec = USMAX; microsec > USMIN; microsec--) {
pwm.writeMicroseconds(servonum, microsec);
}
delay(500);
servonum++;
if (servonum > 7) servonum = 0; // Cycle through first 8 servos
}
Specifications:
- I2C Protocol Interface
- Compatible with 3.3V and 5V MCUs
- Frequency range: 24 Hz to 1526 Hz
- 16 PWM output channels
- Supply Voltage: 2.3 V to 5.5 V
- Operating Temperature: -40 °C to +85 °C
- Resolution: 12-bit (4096 steps)
Important Files:
Arduino Sample Code:
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
// Use default I2C address 0x40
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
#define SERVOMIN 150 // Min pulse length out of 4096
#define SERVOMAX 600 // Max pulse length out of 4096
#define USMIN 600 // Min microsecond length
#define USMAX 2400 // Max microsecond length
#define SERVO_FREQ 50 // Typical servo frequency ~50 Hz
uint8_t servonum = 0;
void setup() {
Serial.begin(9600);
Serial.println("8 channel Servo test!");
pwm.begin();
pwm.setOscillatorFrequency(27000000);
pwm.setPWMFreq(SERVO_FREQ); // Analog servos run at ~50 Hz
delay(10);
}
// Optional function to set pulse length in seconds (not precise)
void setServoPulse(uint8_t n, double pulse) {
double pulselength = 1000000; // 1,000,000 us per second
pulselength /= SERVO_FREQ; // us per period
Serial.print(pulselength);
Serial.println(" us per period");
pulselength /= 4096; // us per bit
Serial.print(pulselength);
Serial.println(" us per bit");
pulse *= 1000000; // convert to us
pulse /= pulselength;
Serial.println(pulse);
pwm.setPWM(n, 0, pulse);
}
void loop() {
// Sweep each servo from min to max and back using setPWM()
Serial.println(servonum);
for (uint16_t pulselen = SERVOMIN; pulselen < SERVOMAX; pulselen++) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
for (uint16_t pulselen = SERVOMAX; pulselen > SERVOMIN; pulselen--) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
// Sweep servo using writeMicroseconds() (less precise)
for (uint16_t microsec = USMIN; microsec < USMAX; microsec++) {
pwm.writeMicroseconds(servonum, microsec);
}
delay(500);
for (uint16_t microsec = USMAX; microsec > USMIN; microsec--) {
pwm.writeMicroseconds(servonum, microsec);
}
delay(500);
servonum++;
if (servonum > 7) servonum = 0; // Cycle through first 8 servos
}