Features:
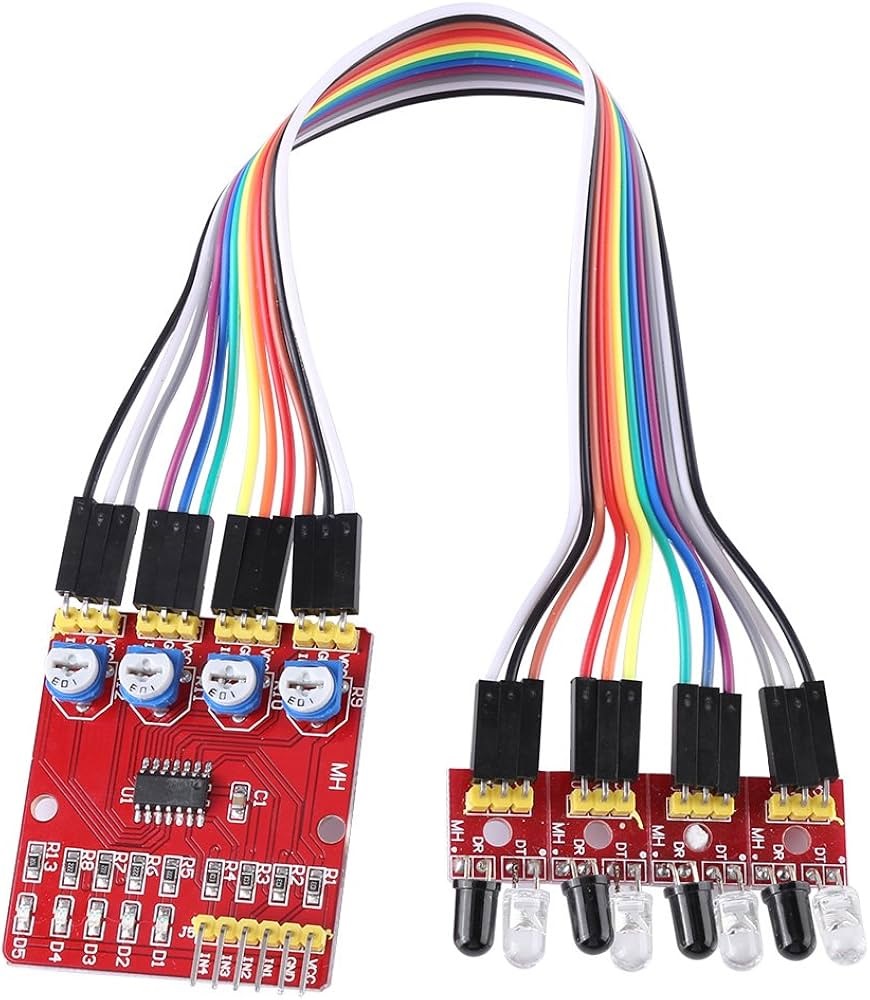
- Multi-functional infrared detection system for obstacle avoidance, line tracking, and black-and-white line tracking
- Adaptable to ambient light, with a pair of infrared transmitting and receiving tubes
- Each channel sensor emits infrared and detects reflected infrared energy to identify obstacles
- More stable performance at closer distances; white surfaces reflect infrared the farthest
- Adjustable detection distance
Specifications:
- Operating voltage: DC 3.3V to 5V
- Operating current: >1A
- Operating temperature: -10°C to +50°C
- Mounting holes: M3 screws
- Detection distance: 1mm – 60cm
- Central plate dimensions: 44 x 40 x 12mm (L x W x H)
- Small plate dimensions: 25 x 12 x 12mm (L x W x H)
Applications:
- Autonomous vehicles: Used in self-driving cars, drones, and other vehicles for obstacle detection and collision avoidance
- Mobile robots: Enables robots to navigate complex environments and avoid objects like furniture or walls
- Line following robots: Ideal for robots using line recognition in automation, logistics, or education
- Home automation: Helps robots like smart vacuums navigate while avoiding collisions
- Industrial automation: Assists robots in safely navigating warehouse or manufacturing environments
- Education: Great for teaching obstacle avoidance and line detection in robotics courses
- Research and development: Suitable for prototyping robotic systems with obstacle avoidance
- Outdoor robotics: Can be used in lawnmowers, drones, or farming robots in outdoor settings
Pin Connections:

Sample Project:
Circuit:
- Arduino UNO R3 × 1
- 4-Channel IR Obstacle Avoidance Proximity Module × 1
- Male to Male jumper wires × 1
- Male to Female jumper wires × 1
Interfacing with Arduino:

Library:
No external library is required for this module to work.
Example Code:
// constants won't change. They're used here to set pin numbers:
const int sensor1 = 2;
int val = 0;
void setup() {
Serial.begin(9600);
pinMode(sensor1, INPUT);
}
void loop() {
val = digitalRead(sensor1);
Serial.println(val);
delay(20);
}
References:
Features:
- Multi-functional infrared detection system for obstacle avoidance, line tracking, and black-and-white line tracking
- Adaptable to ambient light, with a pair of infrared transmitting and receiving tubes
- Each channel sensor emits infrared and detects reflected infrared energy to identify obstacles
- More stable performance at closer distances; white surfaces reflect infrared the farthest
- Adjustable detection distance
Specifications:
- Operating voltage: DC 3.3V to 5V
- Operating current: >1A
- Operating temperature: -10°C to +50°C
- Mounting holes: M3 screws
- Detection distance: 1mm – 60cm
- Central plate dimensions: 44 x 40 x 12mm (L x W x H)
- Small plate dimensions: 25 x 12 x 12mm (L x W x H)
Applications:
- Autonomous vehicles: Used in self-driving cars, drones, and other vehicles for obstacle detection and collision avoidance
- Mobile robots: Enables robots to navigate complex environments and avoid objects like furniture or walls
- Line following robots: Ideal for robots using line recognition in automation, logistics, or education
- Home automation: Helps robots like smart vacuums navigate while avoiding collisions
- Industrial automation: Assists robots in safely navigating warehouse or manufacturing environments
- Education: Great for teaching obstacle avoidance and line detection in robotics courses
- Research and development: Suitable for prototyping robotic systems with obstacle avoidance
- Outdoor robotics: Can be used in lawnmowers, drones, or farming robots in outdoor settings
Pin Connections:
Sample Project:
Circuit:
- Arduino UNO R3 × 1
- 4-Channel IR Obstacle Avoidance Proximity Module × 1
- Male to Male jumper wires × 1
- Male to Female jumper wires × 1
Interfacing with Arduino:
Library:
No external library is required for this module to work.
Example Code:
// constants won't change. They're used here to set pin numbers:
const int sensor1 = 2;
int val = 0;
void setup() {
Serial.begin(9600);
pinMode(sensor1, INPUT);
}
void loop() {
val = digitalRead(sensor1);
Serial.println(val);
delay(20);
}