Features:
- Quad L9110S Chips: Drives 4 DC motors or 2 4-wire 2-phase stepping motors.
- Wide Voltage Range: 2.5V to 12V supply compatibility.
- High Current Handling: Up to 0.8A continuous working current.
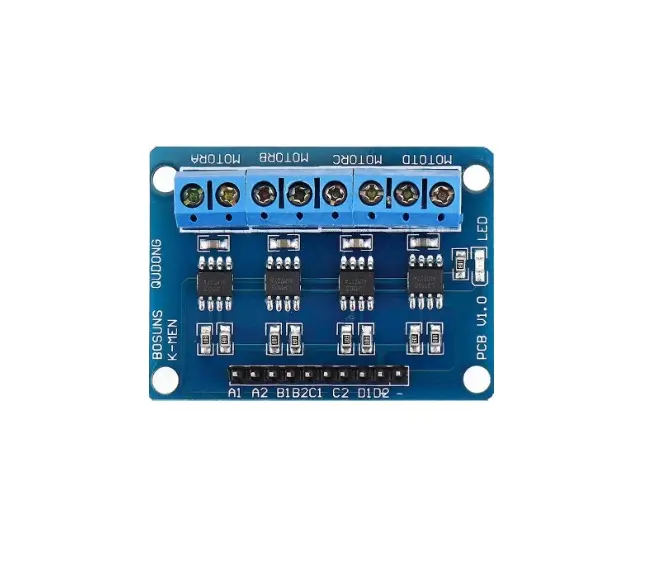
- Module Interface: A1, A2, B1, B2, C1, C2, D1, and D2 for MCU control.
- PCB Terminal Block: Connections for MOTOR A, B, C, and D.
Principle of Work:
Each L9110S chip is a dual H-bridge motor driver, allowing control over motor direction and speed. Inputs from a microcontroller control the H-bridges through logic signals, determining motor behavior.
Pinout of the Module:

| Pin | Label | Description |
|---|---|---|
| 1 | A1 | Forward input for MOTOR A |
| 2 | A2 | Reverse input for MOTOR A |
| 3 | B1 | Forward input for MOTOR B |
| 4 | B2 | Reverse input for MOTOR B |
| 5 | C1 | Forward input for MOTOR C |
| 6 | C2 | Reverse input for MOTOR C |
| 7 | D1 | Forward input for MOTOR D |
| 8 | D2 | Reverse input for MOTOR D |
| 9 | +ve | Power input (2.5V–12V) |
| 10 | -ve | Ground input |
PCB Terminal Block Description:
| Terminal | Motor | Description |
|---|---|---|
| 1 | MOTOR A | 2-pin motor connection |
| 2 | MOTOR B | 2-pin motor connection |
| 3 | MOTOR C | 2-pin motor connection |
| 4 | MOTOR D | 2-pin motor connection |
Example Code:
// Arduino Pins
const int A1 = 2;
const int A2 = 3;
void setup() {
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
}
void loop() {
motorForward();
delay(2000);
motorStop();
delay(1000);
motorReverse();
delay(2000);
motorStop();
delay(1000);
}
void motorForward() {
digitalWrite(A1, HIGH);
digitalWrite(A2, LOW);
}
void motorReverse() {
digitalWrite(A1, LOW);
digitalWrite(A2, HIGH);
}
void motorStop() {
digitalWrite(A1, LOW);
digitalWrite(A2, LOW);
}
Applications:
- Robotics projects
- RC vehicles
- Home automation systems
- DIY and educational electronics
- Camera gimbals and interactive installations
Technical Details:
- Voltage Input: 2.5V – 12V
- Max Current: 0.8A
- Motor Types: DC motors, 4-wire 2-phase stepping motors
- Size: Compact module
- Library: No additional library required
Comparison with L293D:
- Voltage Range: L9110S (2.5V–12V) vs L293D (4.5V–36V)
- Max Current: L9110S (0.8A) vs L293D (0.6A per channel)
- Heat Dissipation: L293D may require cooling
- Use Case: L9110S for cost-effective low-mid power needs, L293D for higher power
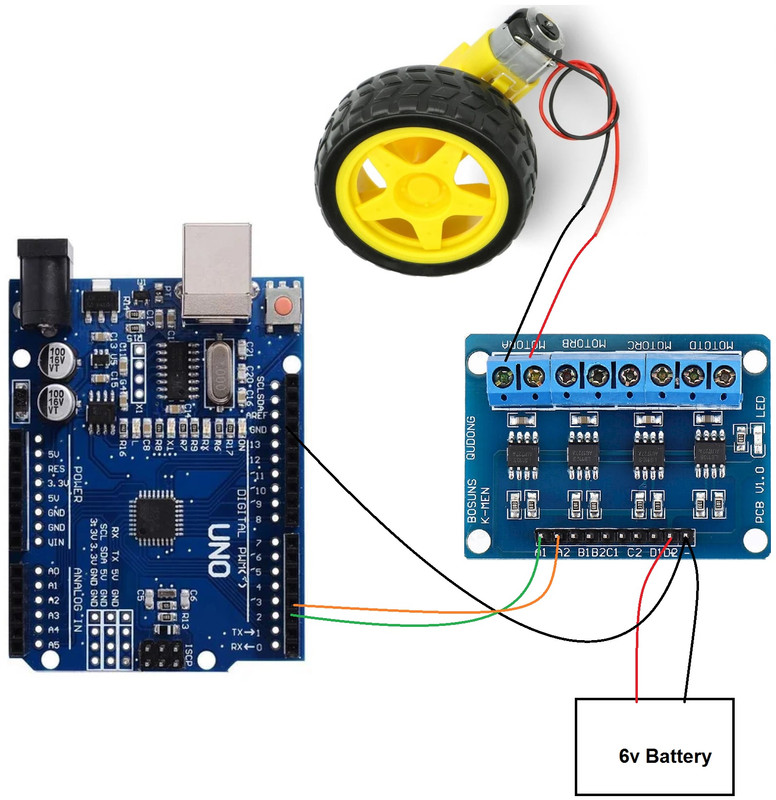
Module Circuit:
Features:
- Quad L9110S Chips: Drives 4 DC motors or 2 4-wire 2-phase stepping motors.
- Wide Voltage Range: 2.5V to 12V supply compatibility.
- High Current Handling: Up to 0.8A continuous working current.
- Module Interface: A1, A2, B1, B2, C1, C2, D1, and D2 for MCU control.
- PCB Terminal Block: Connections for MOTOR A, B, C, and D.
Principle of Work:
Each L9110S chip is a dual H-bridge motor driver, allowing control over motor direction and speed. Inputs from a microcontroller control the H-bridges through logic signals, determining motor behavior.
Pinout of the Module:
| Pin | Label | Description |
|---|---|---|
| 1 | A1 | Forward input for MOTOR A |
| 2 | A2 | Reverse input for MOTOR A |
| 3 | B1 | Forward input for MOTOR B |
| 4 | B2 | Reverse input for MOTOR B |
| 5 | C1 | Forward input for MOTOR C |
| 6 | C2 | Reverse input for MOTOR C |
| 7 | D1 | Forward input for MOTOR D |
| 8 | D2 | Reverse input for MOTOR D |
| 9 | +ve | Power input (2.5V–12V) |
| 10 | -ve | Ground input |
PCB Terminal Block Description:
| Terminal | Motor | Description |
|---|---|---|
| 1 | MOTOR A | 2-pin motor connection |
| 2 | MOTOR B | 2-pin motor connection |
| 3 | MOTOR C | 2-pin motor connection |
| 4 | MOTOR D | 2-pin motor connection |
Example Code:
// Arduino Pins
const int A1 = 2;
const int A2 = 3;
void setup() {
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
}
void loop() {
motorForward();
delay(2000);
motorStop();
delay(1000);
motorReverse();
delay(2000);
motorStop();
delay(1000);
}
void motorForward() {
digitalWrite(A1, HIGH);
digitalWrite(A2, LOW);
}
void motorReverse() {
digitalWrite(A1, LOW);
digitalWrite(A2, HIGH);
}
void motorStop() {
digitalWrite(A1, LOW);
digitalWrite(A2, LOW);
}
Applications:
- Robotics projects
- RC vehicles
- Home automation systems
- DIY and educational electronics
- Camera gimbals and interactive installations
Technical Details:
- Voltage Input: 2.5V – 12V
- Max Current: 0.8A
- Motor Types: DC motors, 4-wire 2-phase stepping motors
- Size: Compact module
- Library: No additional library required
Comparison with L293D:
- Voltage Range: L9110S (2.5V–12V) vs L293D (4.5V–36V)
- Max Current: L9110S (0.8A) vs L293D (0.6A per channel)
- Heat Dissipation: L293D may require cooling
- Use Case: L9110S for cost-effective low-mid power needs, L293D for higher power
Module Circuit: