
Motor DC Metal Geared w/Encoder - 6V 300RPM 3.6Kg.cm
This metal-geared DC motor with an integrated encoder offers precise control and feedback for robotics and automation applications. Operating at 6V with a 20:1 metal gearbox, it features a quadrature encoder providing a resolution of 11 counts per revolution of the motor shaft (equivalent to 224.4 counts per revolution of the gearbox output shaft).
Package Includes:
- Metal DC Geared Motor w/Encoder - 6V 300RPM 3.6Kg·cm × 1
- JST 6-Pin cable × 1
The motor delivers a maximum efficiency point at 0.7Kg·cm load, 245RPM, and 1.2W, with a maximum power point at 1.8Kg·cm load, 160RPM, and 2W. With a stall torque of 3.6Kg·cm and a stall current of 2.7A, it offers robust performance. The encoder operates at 3.3V or 5V and provides precise feedback for motor position.
Compact in size (50 × Φ24.4 mm) and lightweight (96g), it's suitable for various robotic and mechatronic projects.
Features:
- High Precision Encoder: Integrated quadrature encoder with 11 counts per revolution for accurate position feedback.
- Versatile Voltage Compatibility: Encoder operates at 3.3V or 5V, providing flexibility for different control systems.
- Efficient Gear Reduction: A 20:1 metal gearbox ensures optimal torque and speed for various load conditions.
- Peak Performance Metrics: Maximum efficiency and power points provide vital performance data for optimal motor usage.
- Robust Construction: With a stall torque of 3.6Kg·cm and a stall current of 2.7A, it offers reliable operation under heavy loads.
- Compact and Lightweight Design: Compact dimensions (50 × Φ24.4 mm) and lightweight build (96g) facilitate integration into various projects.
Specifications:
- Motor Rated Voltage: 6V
- Encoder Rated Voltage: 3.3V / 5V
- Reducer Reduction Ratio: 1:20
- No-load Speed: 300RPM @ 0.1A
- Maximum Efficiency Point: Load 0.7Kg·cm / 245RPM / 1.2W / 0.4A
- Maximum Power Point: Load 1.8Kg·cm / 160RPM / 2W / 0.8A
- Stall Torque: 3.6Kg·cm
- Stall Current: 2.7A
- Hall Resolution: 11 × 20.4 = 224.4 PPR/RPM
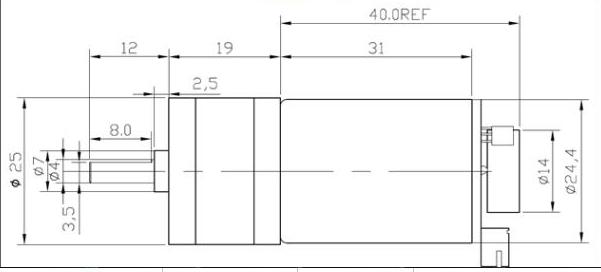
- Dimension: 50 × Φ24.4 mm / 1.97 × Φ0.96 inches
- Weight: 96g
Pinout:
pinmap.png)
These units have an 8 mm length, 4 mm-diameter D-shaped output shaft. This motor is intended for use at 6V, though the motor can begin rotating at voltages as low as 1V. This motor is an ideal option for your mobile robot project.
The motor delivers a maximum efficiency point at 0.7Kg·cm load, 245RPM, and 1.2W, with a maximum power point at 1.8Kg·cm load, 160RPM, and 2W. With a stall torque of 3.6Kg·cm and a stall current of 2.7A, it offers robust performance. The encoder operates at 3.3V or 5V and provides precise feedback for motor position.
Compact in size (50 × Φ24.4 mm) and lightweight (96g), it's suitable for various robotic and mechatronic projects.
Features:
- High Precision Encoder: Integrated quadrature encoder with 11 counts per revolution for accurate position feedback.
- Versatile Voltage Compatibility: Encoder operates at 3.3V or 5V, providing flexibility for different control systems.
- Efficient Gear Reduction: A 20:1 metal gearbox ensures optimal torque and speed for various load conditions.
- Peak Performance Metrics: Maximum efficiency and power points provide vital performance data for optimal motor usage.
- Robust Construction: With a stall torque of 3.6Kg·cm and a stall current of 2.7A, it offers reliable operation under heavy loads.
- Compact and Lightweight Design: Compact dimensions (50 × Φ24.4 mm) and lightweight build (96g) facilitate integration into various projects.
Specifications:
- Motor Rated Voltage: 6V
- Encoder Rated Voltage: 3.3V / 5V
- Reducer Reduction Ratio: 1:20
- No-load Speed: 300RPM @ 0.1A
- Maximum Efficiency Point: Load 0.7Kg·cm / 245RPM / 1.2W / 0.4A
- Maximum Power Point: Load 1.8Kg·cm / 160RPM / 2W / 0.8A
- Stall Torque: 3.6Kg·cm
- Stall Current: 2.7A
- Hall Resolution: 11 × 20.4 = 224.4 PPR/RPM
- Dimension: 50 × Φ24.4 mm / 1.97 × Φ0.96 inches
- Weight: 96g
Pinout:
These units have an 8 mm length, 4 mm-diameter D-shaped output shaft. This motor is intended for use at 6V, though the motor can begin rotating at voltages as low as 1V. This motor is an ideal option for your mobile robot project.