Features
- Multi-GNSS support: GPS / BDS / GLONASS / Galileo / QZSS / SBAS
- 32 tracking channels for improved accuracy
- High sensitivity for weak signal environments
- Low power consumption for embedded systems
- UART communication with standard NMEA output
- Compact size for IoT and portable devices
Principle of Operation
The module receives RF signals from multiple GNSS satellites and processes them using the internal AT6558 GNSS SoC. With 32 tracking channels, it calculates distance based on signal travel time from multiple satellites. Using trilateration, it determines precise position (latitude, longitude, altitude). Multi-constellation fusion improves accuracy, stability, and performance in weak signal environments such as urban areas.
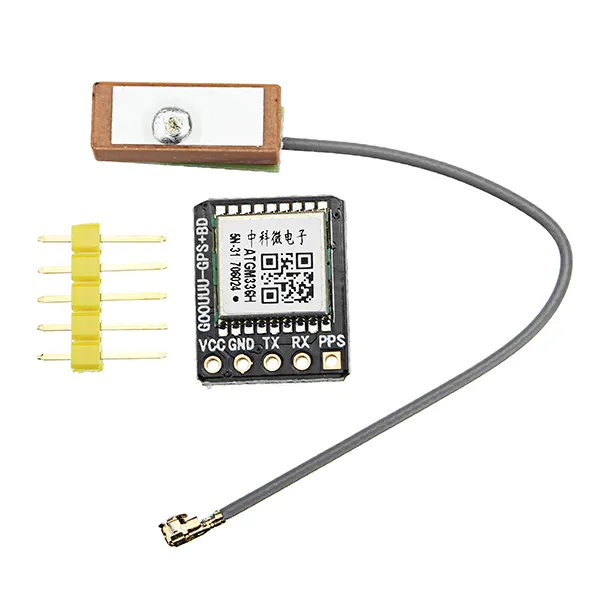
Pinout

- VCC: Power input (3.3V–5V depending on board design)
- GND: Ground
- TX: UART data output (NMEA sentences)
- RX: UART command input
- PPS: 1 pulse per second timing output
- RF_IN: Active antenna input
Circuit Connection
Basic Arduino / MCU Wiring:

- VCC → 3.3V or 5V supply (check board variant)
- GND → Ground
- TX → MCU RX pin (SoftwareSerial RX)
- RX → MCU TX pin (optional for configuration)
- RF_IN → Connect active GNSS antenna
Example wiring (Arduino UNO): ATGM336H-5N Arduino UNO --------------------------- VCC → 5V GND → GND TX → D11 (RX) RX → D12 (TX)
Arduino Code Example
#include <SoftwareSerial.h>
SoftwareSerial gpsSerial(11, 12); // RX, TX
void setup() {
Serial.begin(9600);
gpsSerial.begin(9600);
Serial.println("GNSS Module Starting...");
}
void loop() {
while (gpsSerial.available()) {
char c = gpsSerial.read();
Serial.write(c); // Print raw NMEA data
}
}
Applications
- Vehicle tracking systems
- GPS navigation devices
- Smart wearables
- IoT asset tracking
- Robotics and autonomous systems
- Timing synchronization systems (PPS)
Specifications
- Model: ATGM336H-5N
- Chip: AT6558 GNSS SoC
- Channels: 32
- Size: 15.7 × 13.1 mm
- Interface: UART
- Output: NMEA sentences
- Power: Low power operation
Features
- Multi-GNSS support: GPS / BDS / GLONASS / Galileo / QZSS / SBAS
- 32 tracking channels for improved accuracy
- High sensitivity for weak signal environments
- Low power consumption for embedded systems
- UART communication with standard NMEA output
- Compact size for IoT and portable devices
Principle of Operation
The module receives RF signals from multiple GNSS satellites and processes them using the internal AT6558 GNSS SoC. With 32 tracking channels, it calculates distance based on signal travel time from multiple satellites. Using trilateration, it determines precise position (latitude, longitude, altitude). Multi-constellation fusion improves accuracy, stability, and performance in weak signal environments such as urban areas.
Pinout
- VCC: Power input (3.3V–5V depending on board design)
- GND: Ground
- TX: UART data output (NMEA sentences)
- RX: UART command input
- PPS: 1 pulse per second timing output
- RF_IN: Active antenna input
Circuit Connection
Basic Arduino / MCU Wiring:
- VCC → 3.3V or 5V supply (check board variant)
- GND → Ground
- TX → MCU RX pin (SoftwareSerial RX)
- RX → MCU TX pin (optional for configuration)
- RF_IN → Connect active GNSS antenna
Example wiring (Arduino UNO): ATGM336H-5N Arduino UNO --------------------------- VCC → 5V GND → GND TX → D11 (RX) RX → D12 (TX)
Arduino Code Example
#include <SoftwareSerial.h>
SoftwareSerial gpsSerial(11, 12); // RX, TX
void setup() {
Serial.begin(9600);
gpsSerial.begin(9600);
Serial.println("GNSS Module Starting...");
}
void loop() {
while (gpsSerial.available()) {
char c = gpsSerial.read();
Serial.write(c); // Print raw NMEA data
}
}
Applications
- Vehicle tracking systems
- GPS navigation devices
- Smart wearables
- IoT asset tracking
- Robotics and autonomous systems
- Timing synchronization systems (PPS)
Specifications
- Model: ATGM336H-5N
- Chip: AT6558 GNSS SoC
- Channels: 32
- Size: 15.7 × 13.1 mm
- Interface: UART
- Output: NMEA sentences
- Power: Low power operation