


Features
- Detects force pressure and bending changes
- Flexible structure suitable for curved and moving surfaces
- High sensitivity to small force or bend variations
- Compact 2.2 inch length for tight spaces
- Simple two pin resistive interface
- Easy integration with microcontrollers
- Durable design with long operational life
Specifications
- Total length 2.2 inches
- Flat resistance approximately 25K ohms
- Bend resistance range 45K to 125K ohms depending on bend
- Resistance tolerance plus or minus 30 percent
- Operating voltage 0 to 5 volts
- Power rating 0.5 watt continuous 1 watt peak
- Life cycle up to one million bends
- Operating temperature range minus 45 to plus 80 degrees Celsius
Principle of Work
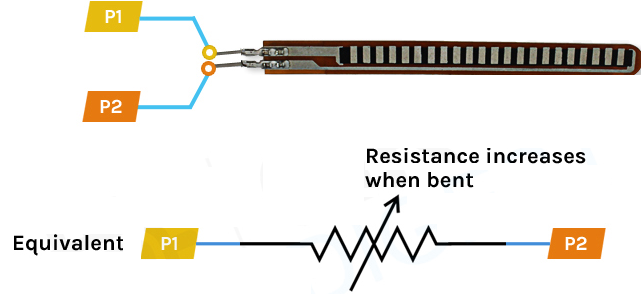
The sensor works based on the piezoresistive effect. When the sensor is flat, it has a known baseline resistance. As it bends or flexes, the conductive material inside stretches, increasing the distance between conductive particles and causing the resistance to rise. By measuring this resistance change using a voltage divider circuit, a microcontroller can determine the amount of bending or applied force.
Pinout
The sensor has two pins:
- P1 one end of the internal resistive element
- P2 the other end of the internal resistive element
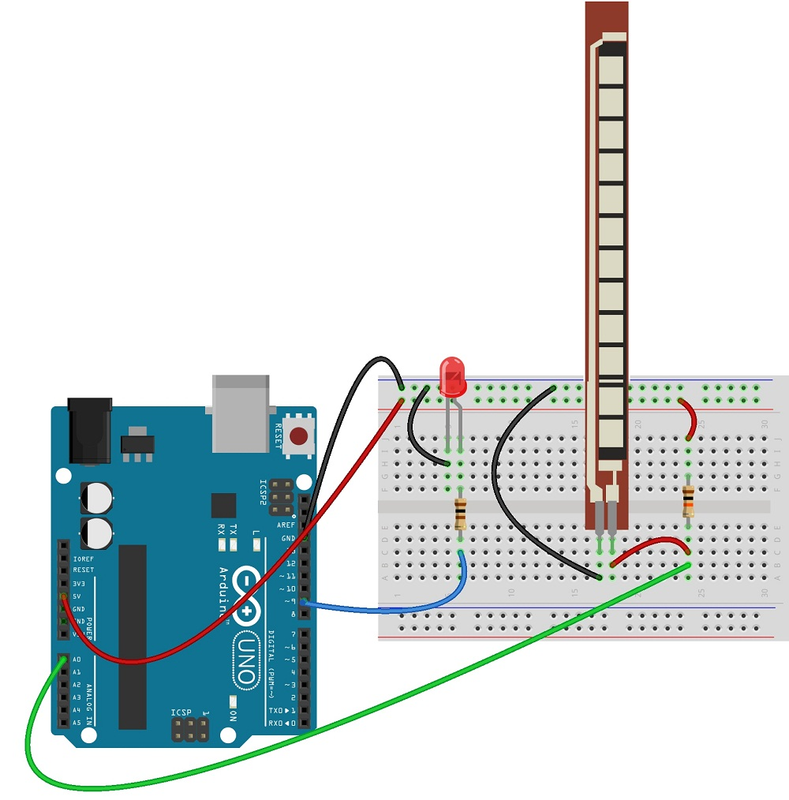
Circuit Connection
Connect the sensor in a voltage divider configuration using a fixed 10K resistor. One end of the sensor connects to 5V, the other end connects to analog pin A0 and through the resistor to ground. An LED can be connected to pin 9 through a 220 or 330 ohm resistor for visual feedback.
Arduino Code Example
// Define pins
const int flexPin = A0;
const int ledPin = 9;
void setup() {
pinMode(ledPin, OUTPUT);
Serial.begin(9600);
}
void loop() {
int flexValue = analogRead(flexPin);
int ledValue = map(flexValue, 0, 1023, 0, 255);
analogWrite(ledPin, ledValue);
Serial.println(flexValue);
delay(10);
}
This example reads the flex sensor value from analog pin A0 and controls the brightness of an LED connected to pin 9 based on the amount of bending.
Applications
- Robotics and robotic arm movement detection
- Medical and rehabilitation devices
- Wearable electronics and smart textiles
- Gaming controllers and virtual reality input devices
- Musical instruments and motion based control systems
- Automotive deformation and movement sensing
Resources
Features
- Detects force pressure and bending changes
- Flexible structure suitable for curved and moving surfaces
- High sensitivity to small force or bend variations
- Compact 2.2 inch length for tight spaces
- Simple two pin resistive interface
- Easy integration with microcontrollers
- Durable design with long operational life
Specifications
- Total length 2.2 inches
- Flat resistance approximately 25K ohms
- Bend resistance range 45K to 125K ohms depending on bend
- Resistance tolerance plus or minus 30 percent
- Operating voltage 0 to 5 volts
- Power rating 0.5 watt continuous 1 watt peak
- Life cycle up to one million bends
- Operating temperature range minus 45 to plus 80 degrees Celsius
Principle of Work
The sensor works based on the piezoresistive effect. When the sensor is flat, it has a known baseline resistance. As it bends or flexes, the conductive material inside stretches, increasing the distance between conductive particles and causing the resistance to rise. By measuring this resistance change using a voltage divider circuit, a microcontroller can determine the amount of bending or applied force.
Pinout
The sensor has two pins:
- P1 one end of the internal resistive element
- P2 the other end of the internal resistive element
Circuit Connection
Connect the sensor in a voltage divider configuration using a fixed 10K resistor. One end of the sensor connects to 5V, the other end connects to analog pin A0 and through the resistor to ground. An LED can be connected to pin 9 through a 220 or 330 ohm resistor for visual feedback.
Arduino Code Example
// Define pins
const int flexPin = A0;
const int ledPin = 9;
void setup() {
pinMode(ledPin, OUTPUT);
Serial.begin(9600);
}
void loop() {
int flexValue = analogRead(flexPin);
int ledValue = map(flexValue, 0, 1023, 0, 255);
analogWrite(ledPin, ledValue);
Serial.println(flexValue);
delay(10);
}
This example reads the flex sensor value from analog pin A0 and controls the brightness of an LED connected to pin 9 based on the amount of bending.
Applications
- Robotics and robotic arm movement detection
- Medical and rehabilitation devices
- Wearable electronics and smart textiles
- Gaming controllers and virtual reality input devices
- Musical instruments and motion based control systems
- Automotive deformation and movement sensing